
平台概述
景行机器人监控平台是专为机器人二次开发设计的平台,提供机器人的测试、监控、调试、运维等一系列功能。平台基于强大的云服务器,能够获取机器人的传感器数据、位姿状态、地图信息等,并对这些数据进行再次处理,通过友好的界面呈现给用户。同时,用户可以通过监控平台对移动机器人发送指令,实现可视化管理。
主要功能
定位管理

实时数据获取:通过机器人的接口,可实时获得传感器数据、地图、位姿等信息。
位姿纠正:当机器人出现位姿偏差时,可即时纠正位姿错误,保障运动效率。
便捷化调试
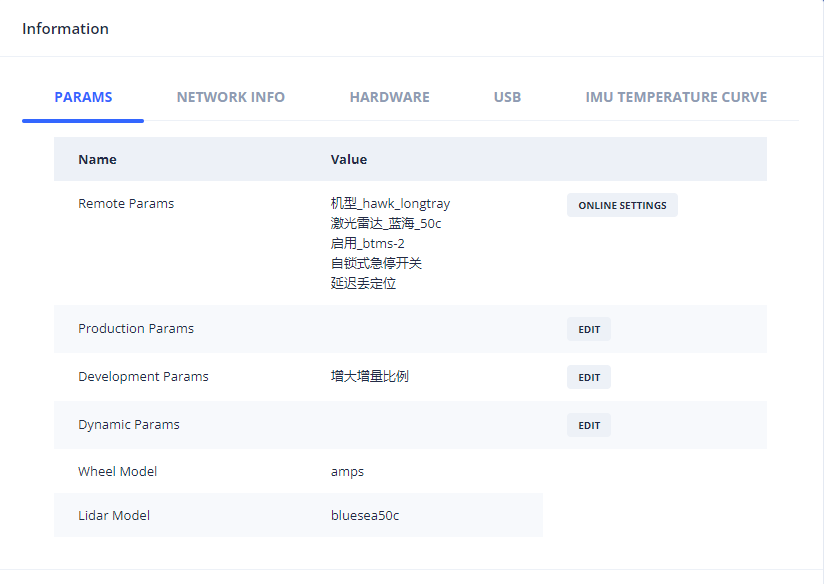
灵活修改参数:支持根据不同应用场景需求,灵活修改运动参数设置。
日志下载功能:提供强大的日志下载功能,方便用户对机器人运动中的数据进行分析和调试。
版本升级:平台应用商店可以将机器人各模块更新到最新版本
精细化诊断
传感器数据显示及诊断:支持对激光雷达、深度相机、里程计、IMU等传感器数据进行显示及诊断。
外部参数标定:支持外部参数的精准标定,全面提升机器人的诊断精度和效果。
常见功能远程运维实例
操作前确认:请先确认机器人是否在线。
1. 远程纠正定位
步骤:
在“ONLINE”列表里,找到需要纠正定位的机器人SN。
点击Nickname,进入该机器人监控详情页面。
点击机器人图标,出现translate、rotate等菜单。
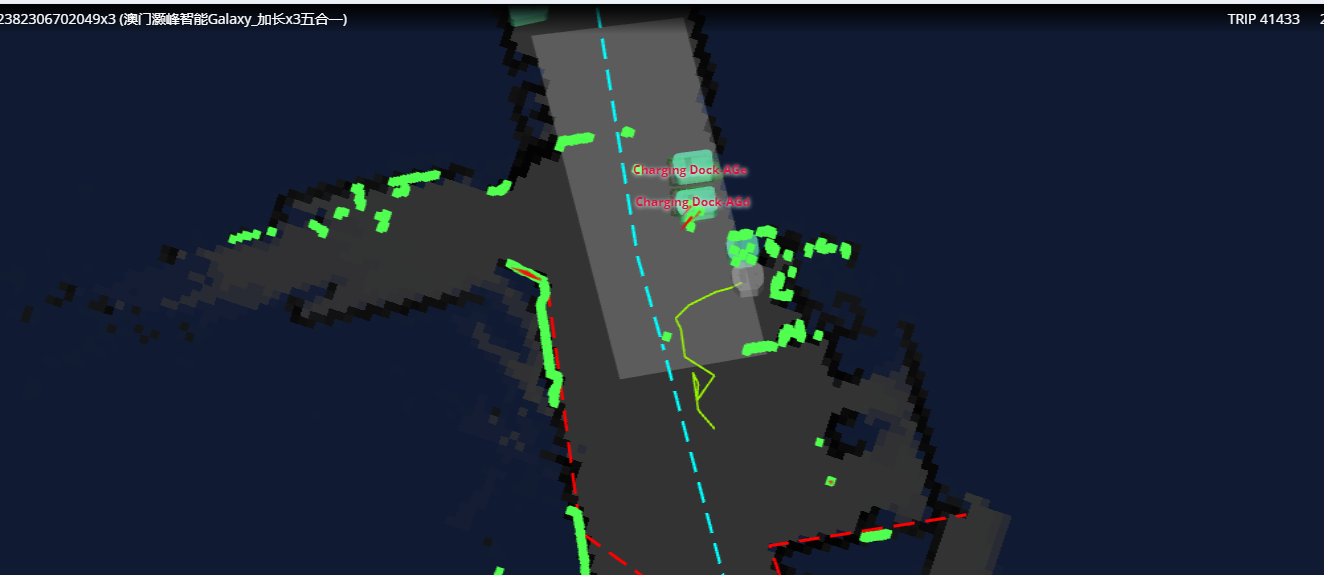
拖拽+旋转机器人的位姿,人工确认机器人在地图的正确位置(打开“LIDAR PTS.”可以辅助判断位置)。

2. 远程发送机器人运动指令
步骤:
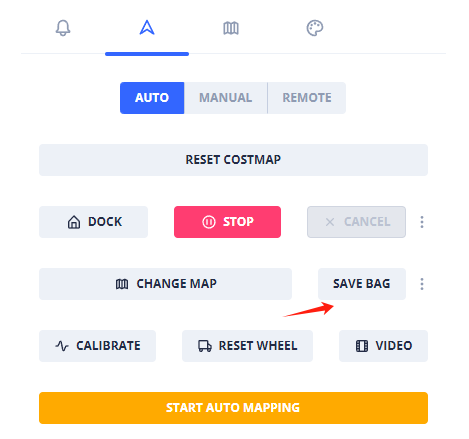
在机器人监控详情页面,点击右侧控制菜单。
当机器人在auto模式下,双击地图白色区域。
机器人会运动到双击的坐标点处。
3. 根据历史action日志判断机器人历史问题
步骤:
在机器人监控详情页的action栏目下,查看所有的运动历史。
当机器人出现问题时,可以通过记录的bag查询问题。
点击save bag,会保存5分钟前到现在点击时刻的日志内容,可用于分析历史问题。
日志与数据查看
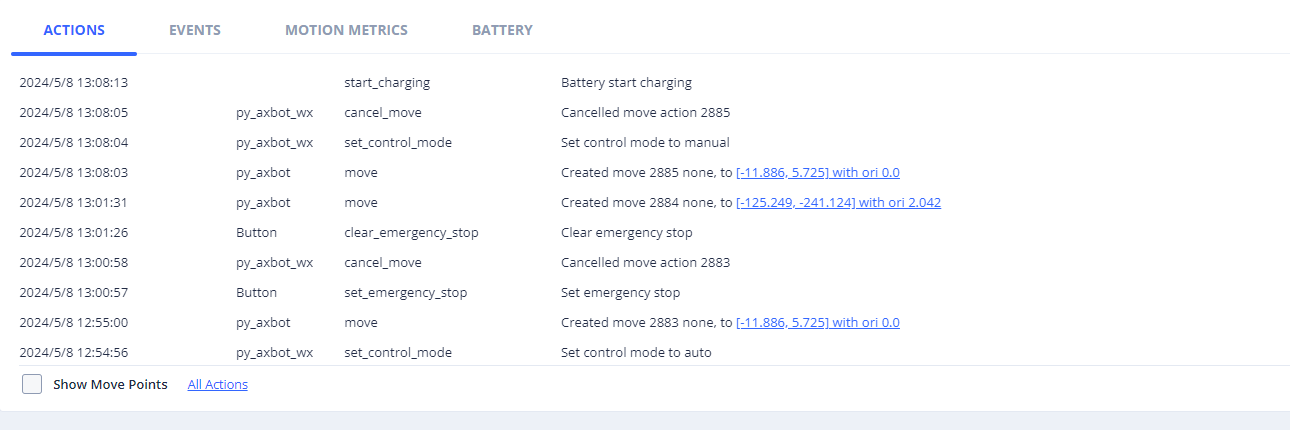
action列表:提供历史运动指令日志。
events列表:提供历史报错故障信息。
motion metrics列表:提供实时运动参数。
battery列表:显示机器人实时电池电压、电流信息。
