
当你拿到一台景行慧动底盘,可以在底盘上加装任何上位机形态,轻松打造自有品牌的机器人。我们提供了一整套接口方案,让您轻松驾驭机器人。

#连接到机器人
要控制机器人,首先我们必须建立连接。
连接机器人有三种方式:
1、使用 WIFI 连接到机器人并形成本地网络。使用http://192.168.12.1:8000。
机器人默认为AP模式,对外提供以sn为名称的WiFi,开发者可以使用上位机连接到该WiFi进行二次开发。(wifi密码为12345678)

2、机器人设置为station模式,这时机器人可以连接客户提供的WiFi网络,比如办公室的局域网,拿到分配的局域ip,基于http://ip:8000也可以进行二次开发;
在AP模式下,访问http://192.168.12.1:8000/wifi_setup,可以将机器人设置为station模式,同时连接场所内的WiFi.(连续三次按压开关键,可以强制将机器人置为AP模式)

3、机器人底盘系统提供了标准网口,上位机可以使用网线与底盘连接,上位机可以设置192.168.25.x的网段,底盘可以通过http://192.168.25.25:8000访问进行二次开发;
#验证
假设有一个安全的本地网络,因此我们只有一个简单的基于 HTTP 标头的身份验证。所有 HTTP 请求都必须有一个标头Secret。
但为了简单起见,在本教程中,我们不会到处重复。
#第一个请求:查询设备信息
以下命令用于curl发出 HTTP 请求,并使用jq 格式化输出:
# The secret is hidden. The real one must be requested.curl -H "Secret: XXXXXXXXXXXXXXXXX" http://localhost:8000/device/status | jq
{
"rosversion": "1.15.11",
"rosdistro": "noetic",
"axbot_version": "1.8.8-rc4-pi64",
"device": {
"model": "hygeia",
"sn": "718xxxxxxx",
"name": "718xxxxxxxx",
"nickname": "hygeia_1016"
},
"baseboard": { "firmware_version": "22a32218" },
"wheel_control": { "firmware_version": "amps_20211103" },
"robot": {
"inscribed_radius": 0.248,
"height": 1.2,
"thickness": 0.546,
"wheel_distance": 0.36,
"width": 0.496
},
"caps": {
"supportsImuRecalibrateService": true,
"supportsShutdownService": true,
"supportsRestartService": true,
"supportsResetOccupancyGridService": true,
"supportsImuRecalibrationFeedback": true,
"supportsSetControlModeService": true,
"supportsSetEmergencyStopService": true,
"supportsWheelStateTopic": true,
"supportsWsV2": true,
"supportsRgbCamera": true,
"supportsExternalRgbCamera": true,
"supportsVisionBasedDetector": true
},
"time": "2022/08/02 16:46:58"}开始行动
要移动机器人,需要两个先决条件:
必须设置地图
必须给出初始姿势
#设置地图
可以使用RobotAdmin平台设置机器人所在的地图。

或者使用Map List API,查找并映射 id。并用于POST /chassis/current-map将地图设置为当前地图。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"map_id": 286}' \
http://localhost:8000/chassis/current-map{
"id": 286,
"uid": "616cd441e1209813dd4bb25d",
"map_name": "-1层",
"create_time": 1647503669,
"map_version": 6,
"overlays_version": 8}#坐标
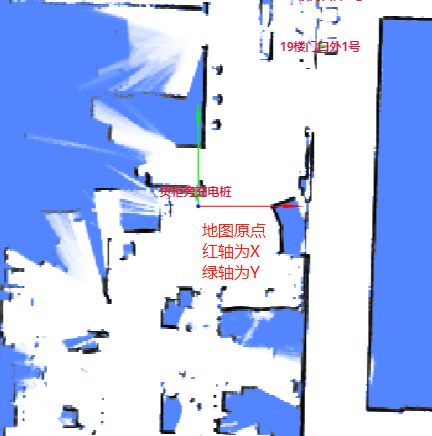
在 上RobotAdmin,两个箭头(X 轴为红色,Y 轴为蓝色)在地图的原点上交叉。两轴构成正交直角坐标系。
点在地图上的坐标标记为 (x, y),即距原点的距离(以米为单位)。
Apose通常表示为:
{
"pos": [0.12, 0.85], // position
"ori": 1.57 // orientation, in radius. The x-positive direction is 0, counter-clockwise}#设置姿势
要移动机器人,必须给出初始姿势。
作为一种常见的做法,映射从充电器开始。因此机器人(在充电器上)的初始姿势成为地图的原点。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"position": [0, 0, 0], "ori": 1.57}' \
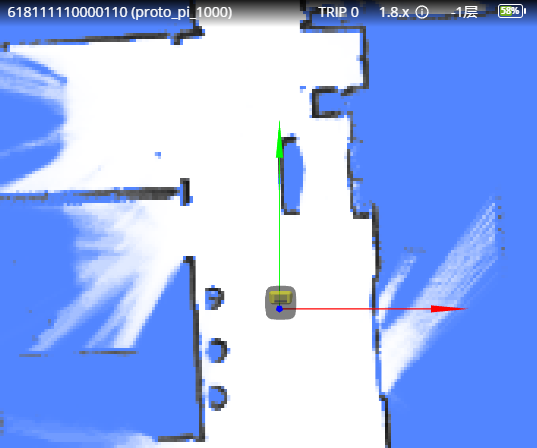
http://localhost:8000/chassis/poseposition: [0, 0, 0]意思是x=0, y=0, z=0。ori: 1.57pi/2,表示机器人的航向为Y正向。
当同时给出地图和初始位姿时,机器人可以看作RobotAdmin:
#开始行动
至于现在,用于POST /chassis/moves创建移动动作。
curl -X POST \
-H "Content-Type: application/json" \
-d '{"type":"standard", "target_x":0.731, "target_y":-1.525, "target_z":0, "creator":"head-unit"}' \
http://localhost:8000/chassis/moves{
"id": 4409,
"creator": "head-unit",
"state": "moving",
"type": "standard",
"target_x": 0.731,
"target_y": -1.525,
"target_z": 0.0,
"target_ori": null,
"target_accuracy": null,
"use_target_zone": null,
"is_charging": null,
"charge_retry_count": 0,
"fail_reason": 0,
"fail_reason_str": "None - None",
"fail_message": "",
"create_time": 1647509573,
"last_modified_time": 1647509573}#移动动作状态
用于GET /chassis/moves/:id查看移动操作的状态。
curl http://localhost:8000/chassis/moves/4409
{
"id": 4409,
"creator": "head-unit",
"state": "finished",
"type": "standard",
"target_x": 0.7310126134385344,
"target_y": -1.5250144001960249,
"target_z": 0.0,
"target_ori": null,
"target_accuracy": null,
"use_target_zone": null,
"is_charging": null,
"charge_retry_count": 0,
"fail_reason": 0,
"fail_reason_str": "None - None",
"fail_message": "",
"create_time": 1647509573,
"last_modified_time": 1647509573}state字段显示动作的状态。
当前动作的状态是不断变化的。虽然可以用上面的API查询,但是效率很低。所以我们提供websocketAPI,让机器人不断地反馈它的状态。这比 REST API 的请求/响应形式更有效。
