
随着路径的不断延伸,机器人在建图过程中会存在一些累计误差,除了利用局部优化、全局优化等来调整之外,还可以利用回环检测来优化位姿。
回环检测是什么?
回环检测,又称闭环检测,是指机器人识别曾到达某场景,使得地图闭环的能力。说的简单点,就是机器人在左转一下,右转一下建图的时候能意识到某个地方是“我”曾经来过的,然后把此刻生成的地图与刚刚生成的地图做匹配。
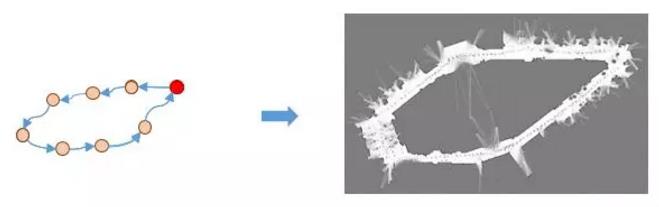
回环检测成功
回环检测之所以能成为一个难点,是因为:如果回环检测成功,可以显著地减小累积误差,帮助机器人更精准、快速的进行避障导航工作。而错误的检测结果可能使地图变得很糟糕。因此,回环检测在大面积、大场景地图构建上是非常有必要的 。
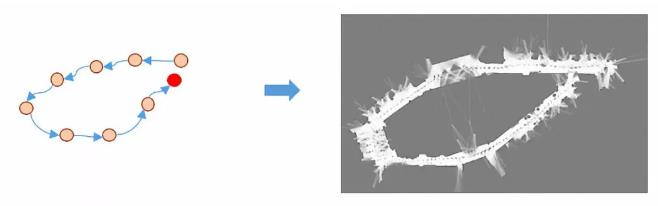
回环检测失败
景行的算法默认有很好的回环检测能力,在超大面积场地,只要将机器人,先走小圈,逐渐绕大圈、转弯处适当原地旋转、可轻松回环。建图人员应实时观察地图是否形成回环,如果发现地图有偏斜,应及时就近找回环处回环或沿原路线往回走,直到回环为止。
如果场地里没有可走的小路,只有一个大圈,那就需要以最短的时间快速走完大圈,推行速度建议超过1m/s,使其快速形成主干路回环。回环后结束建图再以增量建图的方式补充细节。
