餐厅机器人操作参考手册
一、首页及功能
1、托盘层,是指显示可以送达几个位置。
2、返航,点击“返航”,机器人将返航待命点,或充电桩位置(在基础设置内设置)。
3、回桩充电,机器人可返航回到充电桩上。

4、快捷送餐:可送4个位置,按距离由近到远依次送达。任务结束后返回待命点或充电桩。
5、多点送餐:一次可送N个位置,按照输入的顺序送达。任务结束后返回待命点或充电桩。
6、直达:一次送一个地址。点对点送达,达到后原地待命,可在界面上直接发下一个任务。
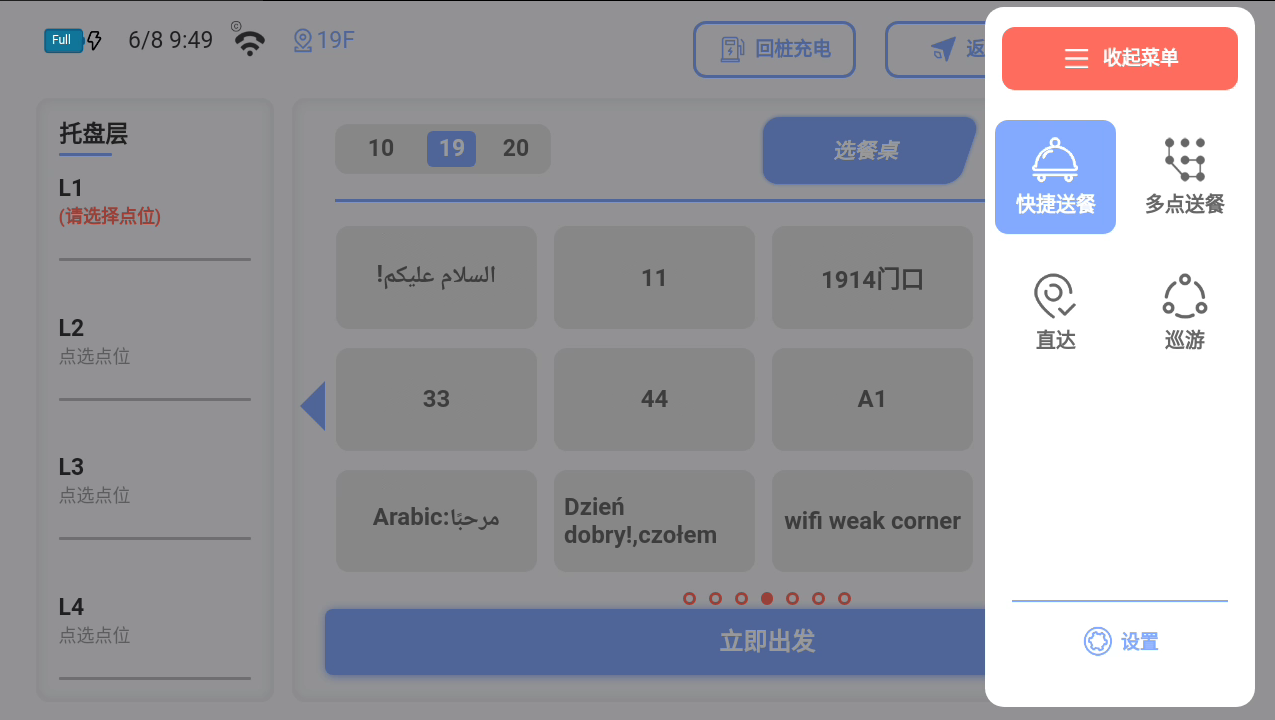
7,巡游
①可在PC端机器人管理平台,设置巡游线路,并可以同步到机器人端。
②可在机器人本地,设置巡游线路,并可以同步到云端后台。

8,初始密码:9999。可在系统设置内修改密码。

二、设置管理
1、基础设置
①主页模式显示:选择常用的哪项后(快捷送物、多点送物、直达其一),主界面会一直显示这项方便后面使用。
②返航待命点:可选待命点,可选充电桩。选待命点后每次任务结束后,机器人会在待命点待命。选充电桩,每次任务结束后,机器人回到充电桩位置。
③充电桩选择:选择对应楼层的充电桩。

2、声音设置
按自己需求关闭或打开,或调整相关音量大小。

3、送餐设置
①智能托盘开关:打开此功能,放上物品,托盘指示灯会有提醒。物品取错也会有提醒。
②对配送停留时间长短、配送暂停时长、机器人行走速度等进行设置。

4、巡游设置
①巡游设置里,设置好巡游暂停时长、行走速度。

②选择巡游线路

③设置巡游时长

④机器人端本地添加巡游线路

5、离线设置
首先机器人需装有支持离线的APP
机器人本地建图、修图等操作。机器人在无网环境下运行。

6、动画设置
可在送餐、巡游、返航时,会显示此动画。

7、休眠动画
打开此功能,机器人在空闲状态时,会显示休眠动画。可设置自动休眠时间。

8、系统设置
①快捷功能
自动模式:机器人开机状态下,此刻不可以推动机器人。
手动模式:点选此项,可以推动机器。切记,推行结束后,要将手动模式切换成自动模式。
重启APP:让车机APP重新启动。
充电桩复位:机器人在充电桩状态下,每次关机再开机后或者机器人发生问题后,将机器人推到充电桩上,必须进行“充电桩复位”操作,才可以使用。作用重定位。
更新地图:之前有过其他楼层的地图进行编辑后,可选“更新地图”,将相关信息更新。
WLAN:可通过此处链接现场的WIFI,机器人本体有个国内的4G卡,如现场网络不好可以使用WIFI。
②多语言设置:可以进行语言切换。
③管理员密码:可以进行密码修改,初始密码9999
④全局定位:当机器人定位出现问题时,可将机器人推到特征点明显的区域,多尝试几次此功能,机器人定位恢复正常。

9、模式切换
①快速点击10下“系统信息”四个字,可以切换成“工厂模式”。
②常规模式,语音是送餐的话术。工厂模式,语音是送物话术。

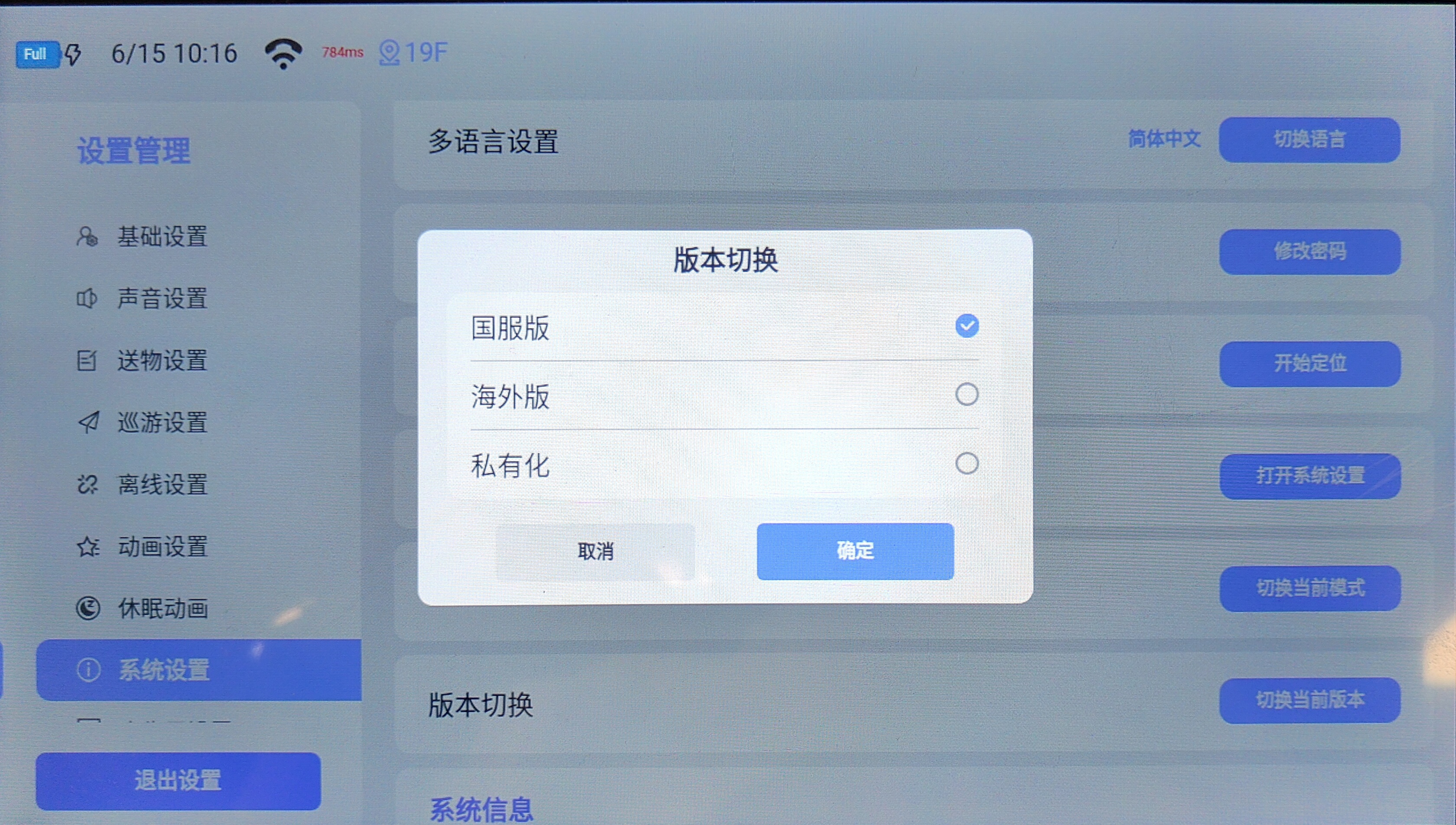
10、版本切换
①快速点击10下“系统信息”四个字,选择“版本切换”。
②国服版,用国内平台进行建图等操作。海外版,用海外平台进行建图等操作。私有化,用户自己搭建私有云,进行本地部署。
三、机器人工作中
机器人在工作中,点击机器人界面,会弹出如下图中内容。可修改任务、结束任务。

四、应急模式界面
按下机器人底盘红色“应急模式”按键,将进入应急界面,此时可推动机器人。用完记得“抬起红色急停按钮”。不然机器人无法自动行走。

五、首页的“回桩充电”、“返航”
①点击首页右上角“回桩充电”、“返航”,机器人会返回充电桩或待命点。
②再次点击界面左下角“停一停”,会弹出四叶草图框,可以对应选择,进行操作。