
反光板又叫条形码,原理是利用条形码中的反光物体的强弱变化来模拟二进制的1和0,反光强的区域为1,反光弱的区域为0。
制作的时候应以工程级的3M反光贴为底板(钻石级的也能用),每隔 2.5 cm 为一个位置,在应为 0 的位置贴上白色胶带。总长32.5cm
选择10cm宽的,长度根据数量选择。(一个码32.5cm)
选择10cm*2.5cm 的标签纸,用于贴在反光板上。
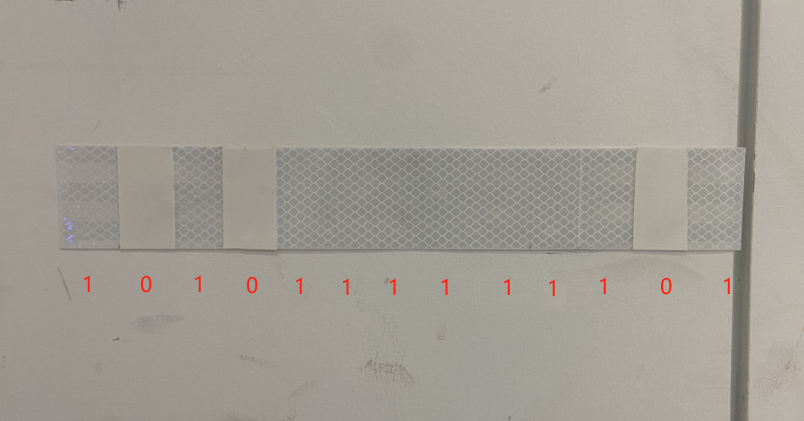
如下图中的反光板的二进制信息为:1010111111101 ,一共 13 个bit。一张地图中不能出现重复反光码。
概念或规定:
● 静区不应该有金属等容易反光的物体
● 起始区和终止区固定为 101
● 数据区为 6 位,校验区为 1 位
注意:反光板安装后,不允许做任何移动或方向的变化,机器人会当做绝对坐标反算自己的位置。安装后的移动会导致机器人立刻丢失定位,机器人坐标位置也将完全错误,此时无论实际偏差多少,都不应该再继续使用。
反光板适用于环境变化较大,频繁丢定位的场地,机器人靠近反光板时,会立即触发纠正定位,帮助机器人快速恢复定位。
另外反光板已支持高精重复定位,高精度停车以满足上位机丰富需求。
1、 在地图上找到需要纠正定位的地点(或需要高精停车的位置),准备安装反光板;
2、 反光板需要安装在激光雷达同一平面;
激光雷达高度23cm左右,反光板最低位置建议在22cm左右
3、高精度定位点的停车角度通常垂直于反光板平面。

4、地图平台增加反光板点位采集。将机器人开机,在正确定位的情况下,打开地图平台,选择远程控制选择该机器人sn,此时可以看到机器人的实时位置。将机器人推到需要停靠的点位,反光板距离建议1米以内。在地图平台点击当前位置,此时会自动添加反光板点位,如果没有出现反光板点位,说明反光板张贴不合理或有遮挡。

场地安装反光板后,反光码本身并不会自动提升所有点位的停靠精度。
普通点位想实现高精度停靠(即二次对接),必须满足两个条件:
1、场地已安装反光板
2、点位是在安装完反光板后,通过“当前位置”重新设置的
因为只有这样创建的点位,系统才会自动绑定对应的反光码。
机器人执行任务时,会先判断目标点位是否绑定了反光码:
如果点位已绑定反光码:
机器人会先停到对接点,再通过反光码进行二次对接,最终精准停到目标位置。
整个停靠逻辑会类似货架点、充电点的高精度对接方式。
如果点位没有绑定反光码:
即使场地里已经安装了反光板,机器人也不会执行二次对接,停靠精度仍然与未安装反光板时一致。
反光码仅支持如下组合:
1010010001101 1010001001101 1011001000101 1011000100101 1010101000101 1010100100101 1010100010101 1010011000101 1010010100101 1010010010101 1010001100101 1010001010101 1011110001101 1011101001101 1011100101101 1011100011101 1011011001101 1011010101101 1011010011101 1011001101101 1011001011101 1011000111101 1010111001101 1010110101101 1010110011101 1010101101101 1010101011101 1010100111101 1010011101101 1010011011101 1010010111101 1010001111101 1011111000101 1011110100101 1011110010101 1011101100101 1011101010101 1011100110101 1011011100101 1011011010101 1011010110101 1011001110101 1010111100101 1010111010101 1010110110101 1010101110101 1010011110101 1011111101101 1011111011101 1011110111101 1011101111101 1011011111101 1010111111101 1011111110101
