
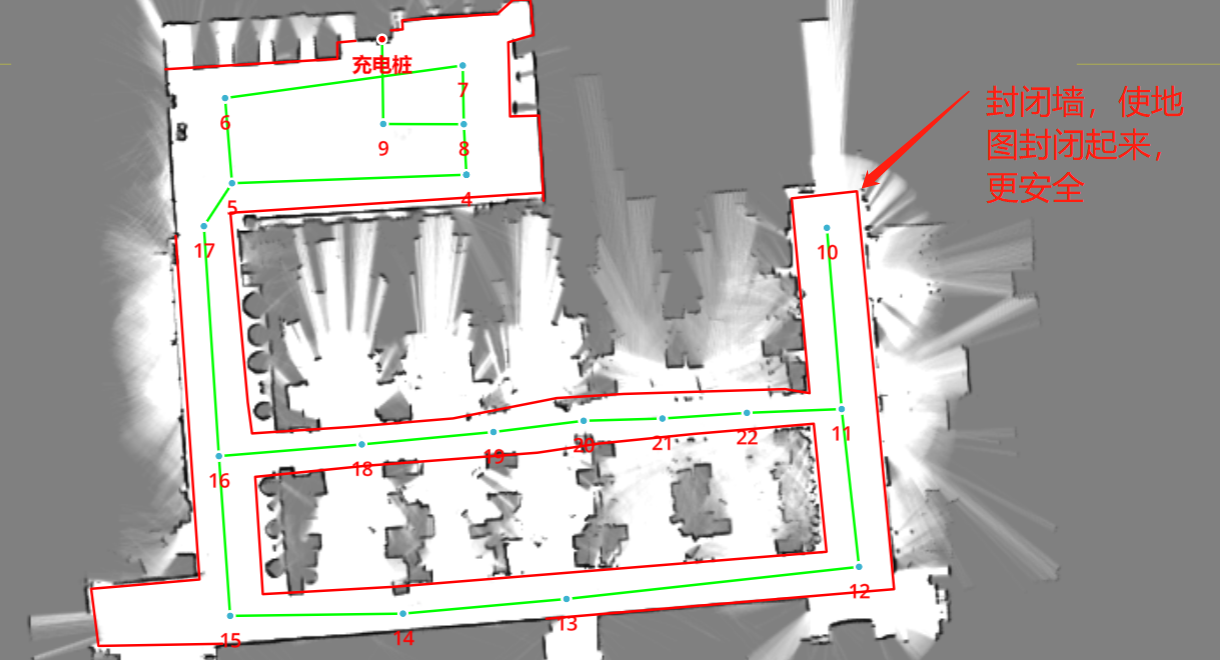
1. 地图最好做封闭处理
玻璃墙面等高透光材质,建议在建图时在玻璃墙面放置障碍保证机器人正确识别,后续在地图上进行虚拟墙设置;细桌子凳子腿等需要在相关区域根据实际情况增加虚拟墙。
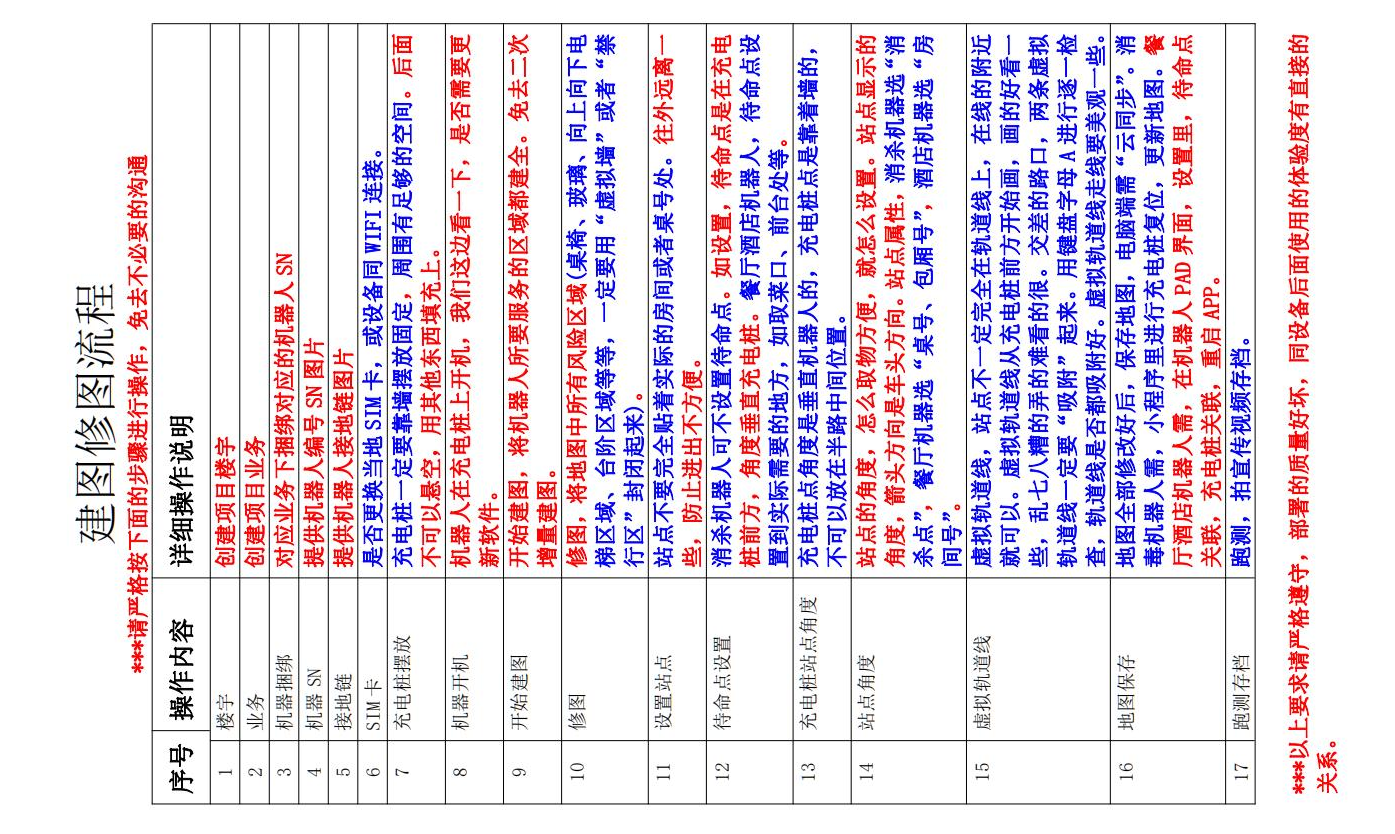
2. 建图修图流程
3. 建图常见细节(推行建图):
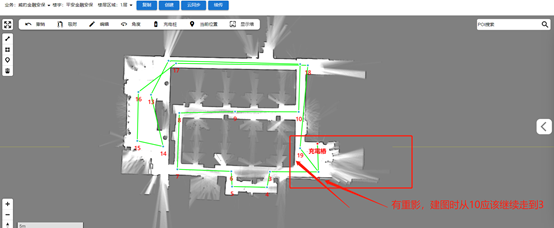
3.1 推机器人建图行走的路线要形成闭合环形,或者建图时要实时观察地图是否有重影,有重影要继续推行,会自动校准重影,否则会造成地图有一定偏差。
3.2 建图时尽量横平竖直走直线,且速度稍缓慢一些,如果观察到有人的阴影出现,可以原地旋转一圈,清除阴影, 或者后期编辑地图清除阴影:

3.3 有玻璃墙等固定障碍时,需要在地图上标记出隔离墙,这样机器人就会远离。
3.4 如果出现走走停停,原因是地图编辑时没有清除路上的点,导致机器人认为有点状障碍,会试探性前进,要擦除人的脚影。

4.机器人建图时的一些基本原则或小技巧:
1.尽量走闭合环形(圆圈),有小回环就挨个走小回环,由多个小圈连接组成大地图。或者建图时要实时观察地图是否有重影虚影,有重影就原地转几圈,会自动校准重影,否则会造成地图有一定偏差(歪)。
2.一些大环境应用场景下建图时,最好让机器人先去完成建图闭环,再去详细扫描环境里的各个小细节。
3. 走到分叉路口最好原地转一圈;从分支道路回来到路口时最好原地转一圈; 走了大圈回到起点时,最好多重合一些,观察是否有重影。
4.建图时尽量横平竖直走直线,速度适中(不快不慢),如果观察到有人的阴影出现,可以原地旋转一圈,清除阴影, 或者后期编辑地图清除阴影;
5.如果地图已经建好,尽量不要在已建好的地图区域反复来回行走,尽快保存地图(轨迹越长,会导致地图数据越大)。
5. 关于防跌落,比如向下的楼梯情况处理:
1)常见的防跌落传感器适用于低速的产品(扫地机器人0.2m/s),机器人的产品速度是0.3-1.2m/s,防跌落传感器检测到悬崖,机器来不及停车;
2)正常情况下通过虚拟墙来规避机器人驶入跌落区域;
3)我们目前是有实时位置置信度检测功能,如果定位不可靠,会检测出来,立即进入保护模式,最大限度减少跌落风险;
4)通过视觉能力可以做防跌落功能,后续版本可以远程升级后开通这个能力。
6、如何实现地图编辑、建图?
有网可通过机器人管理平台的建图模块功能进行建图和地图信息编辑
7、如何实现离线地图编辑和建图;
A.无网使用时需调用SDK接口创建地图和编辑地图点位,需自行开发工具;
B.或者使用我方提供的离线建图工具
C.私有化部署
8、如何下载已建好的地图到另一台机器人,地图的数据格式是怎样的?
离线建图工具支持复制地图,可使用该工具操作
9、如果银行部署的时候,4G网卡拆掉后,机器人的所有功能能否都正常使用?
需要自行开发操作界面或内网下发指令控制机器人
10、底盘是否配备麦克风,如有请提供接口协议?
无麦克风
11、如果同一个网点布放多台机器人,遇到交通阻塞的问题怎么解决?
私有化部署
12、机器人行驶如何获取,具体的功能特点是怎样的?
接口文档都有明确 https://service.autoxing.com/sdk/v1.0/docs/#/AXRobot-subscribeRealState
13、任务执行失败的时候是不是会给我发送一个任务执行失败的信号?
有错误返回值
